The Real World, Operations research, Simulation, Computer simulation, Machine learning, Neural network
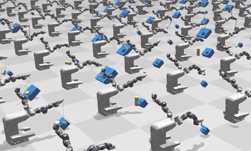
RT @lilianweng: One of the hardest problems in robotics is that models trained in simulator normally do not work on real robots. Domain randomization is a simple but powerful idea to close this sim2real gap: https://t.co/MjaiVgVGqf
OpenDomain Randomization for Sim2Real Transfer
If a model or policy is mainly trained in a simulator but expected to work on a real robot, it would surely face the sim2real gap. Domain Randomization (DR) ...
RT @lilianweng: One of the hardest problems in robotics is that models trained in simulator normally do not work on real robots. Domain randomization is a simple but powerful idea to close this sim2real gap: https://t.co/MjaiVgVGqf
OpenDomain Randomization for Sim2Real Transfer
If a model or policy is mainly trained in a simulator but expected to work on a real robot, it would surely face the sim2real gap. Domain Randomization (DR) ...
We are sorry, we could not find the related article
If you are curious about Artificial Intelligence News Essentials and Research
Please click on:
Or signup to our newsletters
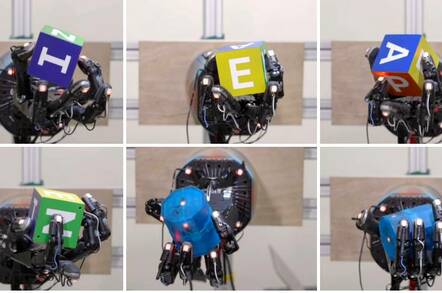
Learning Dexterity

We've trained a human-like robot hand to manipulate physical objects with unprecedented dexterity.
Click here to read the article
Given that policy search corresponds to this more difficult context, we consider five solutions: 1. searching for high utility policy parameters without building a utility model (Section ...
Train Donkey Car in Unity Simulator with Reinforcement Learning
Donkey Car trained with Double Deep Q Learning (DDQN) in Unity Simulator.
OpenAI Demonstrates Complex Manipulation Transfer from Simulation to Real World

By adding randomness to a relatively simple simulation, OpenAI's robot hand learned to perform complex in-hand manipulation
NVIDIA Unveils New Reinforcement Learning Research at ICRA 2019
This week, NVIDIA researchers from the newly opened robotics research lab in Seattle, Washington are presenting a new proof of concept reinforcement learning approach that aims to enhance ...
Sim2Real – Using Simulation to Train Real-Life Grasping Robots9 min read

Grasping real-world objects is considered one of the more iconic examples of the current limits of machine intelligence. While humans can easily grasp and pick up objects they’ve never seen ...
Neuroevolution: A Primer On Evolving Artificial Neural Networks

In the last years, artificial neural networks (ANN) have successfully been applied across a number of tasks. However, designing well performing ANNs requires expert knowledge and ...
Simulations Are The Key To Intelligent Robots
I read an article entitled Games Hold the Key to Teaching Artificial Intelligent Systems, by Danny Vena, in which the author states that computer games like Minecraft, Civilization, and ...
Generating Natural-Language Text with Neural Networks
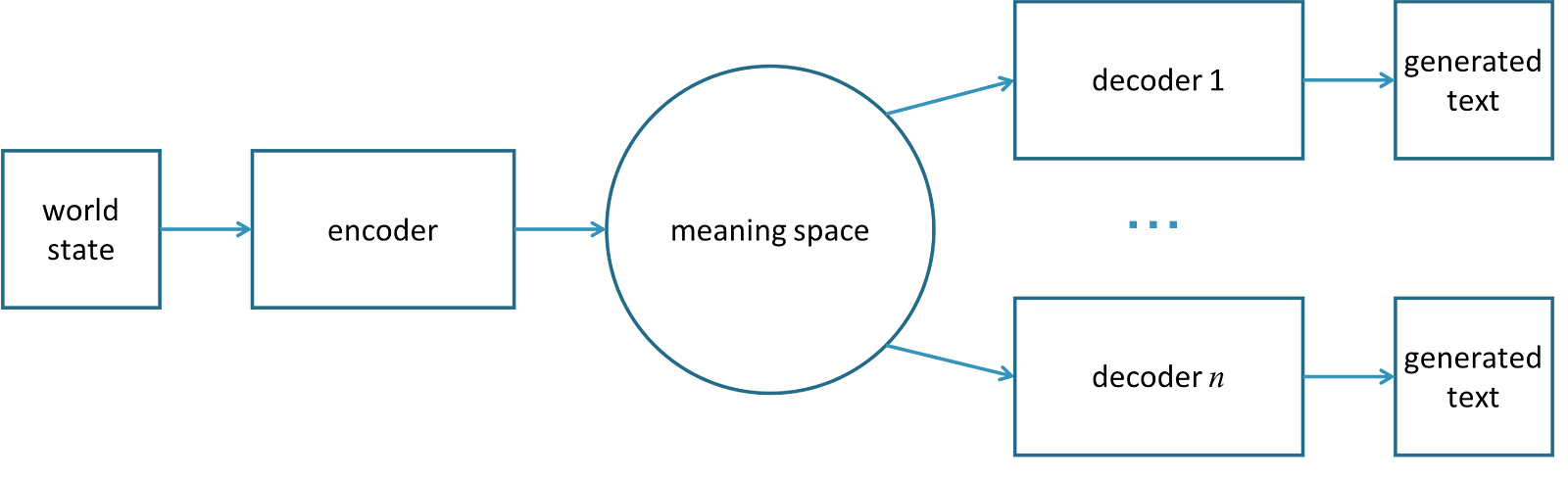
Computers are illiterate. Reading requires mapping the words on a page to shared concepts in our culture and commonsense understanding, and…
Relax, Amazon workers – OpenAI-trained robo hand isn't much use (well, not right now)
Turns out replacing humans isn't that easy after all
NVIDIA Researchers Unveil Concept to Close Simulation-Reality Gap

New approach aims to enhance how robots trained in simulation will perform in the real world.
Simulation-Based Design of Dynamic Controllers for Humanoid Balancing
Simulation-Based Design of Dynamic Controllers for Humanoid Balancing Jie Tan Zhaoming Xie Byron Boots C. Karen Liu Abstract— Model-based trajectory optimization often fails to find a ...
Online Bayesian Deep Learning in Production at Tencent
Bayesian deep learning methods often look like a theoretical curiosity, rather than a practically useful tool, and I'm personally a bit skeptical about the practical usefulness of some of ...